
隨著人工智能、大數據、物聯網等前沿技術與傳統船舶的深度融合,船舶技術由自動化向自主化方向“進化”,船舶自主化技術的應用將引發船舶行業的技術革命,為船舶技術的發展帶來新的機遇與挑戰。同時,船舶自主化技術是一門新興技術,產品規范、技術標準、法律法規等方面尚未成熟,而自動化技術在船舶領域已經有了幾十年的應用經驗,技術及配套體系相對完善,船舶自主化技術在發展過程中即借鑒了船舶自動化技術的應用經驗,又呈現出獨特的技術發展路徑,兩種技術即深度融合又全面顛覆。因此,理解船舶自主化技術與自動化技術的區別,成為制定船舶自主化技術發展路徑的關鍵。
國際海事組織(IMO)在海安會(MSC)第99次會議上分別對船舶自主化和自動化系統進行了定義:
船舶自主化系統即系統使用人工智能或計算機程序獨立于人員的監督和控制對船舶功能進行管理和控制。
船舶自動化系統即在人員的監管下,系統提供決策支持和/或執行船舶功能。
在船舶自主化系統定義中,人工智能是實現系統自主化的核心技術,這一定義與我國船舶智能化的定義基本相同,或者可以理解為船舶智能化是自主化的應用形式之一。從IMO對船舶自主化和自動化系統的定義來看,自主化與自動化系統最大區別在于是否需要人員在控制環路中發揮作用。為了更好的理解自主化與自動化的區別,需要從這兩種技術的工作原理進行分析,自動化和自主化系統的工作原理如圖1所示:
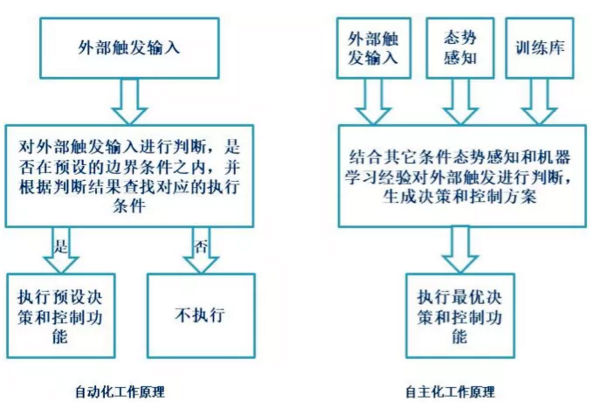
圖1 自動化和自主化的工作原理
自動化系統工作原理的核心是外部觸發輸入必須處于預設的邊界條件之內,才能進行判斷,從而執行相應的功能指令。在相同的邊界條件下,功能指令的執行相同。從本質來看,自動化系統主要依靠人類經驗,并轉化為邊界條件在系統中進行預設。因此,自動化功能的實現受限于人類特殊經驗、預設邊界條件數量和運算執行速度等因素。當系統功能較為復雜時,使用自動化技術無法覆蓋所有工作場景,需要人員在其控制環路進行監控,避免未知風險的發生。自主化系統一般不進行邊界條件的預設,主要使用人工智能技術,依靠機器學習的經驗,結合外部觸發輸入及其他條件的態勢感知進行機器判斷,生成相應的執行指令,執行指令具有不可預測的特點。自主化功能的實現主要受限于算法質量、運算速度和訓練庫范圍等因素。由于人工智能算法發展緩慢,現階段系統實現完全自主化還比較困難。從自動化和自主化的工作原理來看,兩者功能實現有著本質的不同,隨著核心處理器技術的高速發展,芯片的處理速度和運算能力顯著提高,應用自動化技術可以預設的邊界條件不斷增多,覆蓋場景不斷擴大,自動化系統在人員在環的情況下,是可以實現一些簡單的自主化功能,如輔助決策系統等。但是在復雜自主化系統領域,自動化技術無法實現完全自主功能,如與航行安全、環保及保障相關的自主化系統。
現階段,自動化還是船舶控制系統的主流應用技術。在降低船員勞動強度、減少船舶配員、提高船舶運營安全等需求的驅動下,船舶技術開始由自動化向自主化進行過渡。船舶自主化技術的應用核心是使用機器等效替代人員對船舶功能進行控制。因此,要從理解人類控制行為的角度來探討船舶自主化技術的發展思路。人類對于特定事件的處理流程如圖2所示:
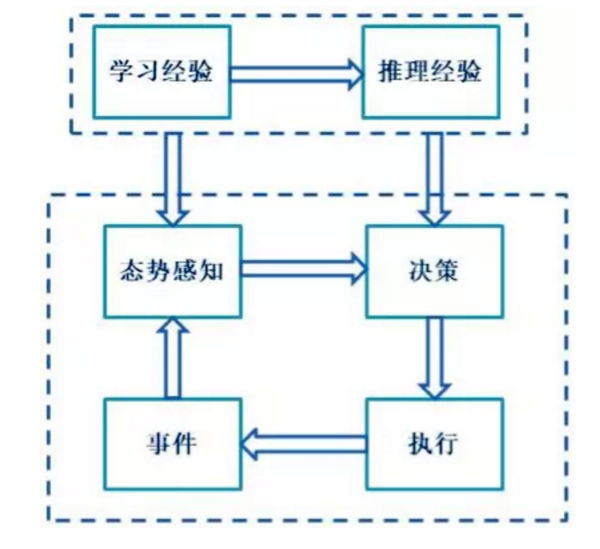
圖2 人類對于特定事件的處理流程
態勢感知:通過學習經驗及推理經驗進行信息收集、篩選、多信源融合的過程
決策:通過學習經驗及推理經驗對態勢感知信息進行判斷并生成決策方案的過程。
執行:根據決策方案執行特定行為的過程。
船舶自主化系統與人類對于特定事件處理流程類似,分為態勢感知、決策和執行三個過程,分別位于自主化系統架構的信息層、決策層和控制層,信息層負責采集、融合有效信息為決策層提供信息輸入,決策層根據信息的輸入生成執行方案,控制層根據執行方案控制船舶系統。其中自主化系統的信息層和決策層主要使用自主化技術進行實現,控制層一般采用自動化技術即可實現。船舶自主化系統架構如圖3所示:

圖3 船舶自主化系統架構
船舶自主化系統的信息層以機器人視覺技術為核心,通過感知傳感器采集場景工況、設備狀態、操控指令等信息并進行融合。近年來,感知傳感器技術發展迅速,在一些船舶系統中已經得到了工程化應用,如航行避碰輔助決策、機艙運維、動力定位等系統。使用感知傳感器,如攝像頭、激光雷達、振動傳感器、流量傳感器等進行態勢感知,使用機器感知傳感器在信息采集的覆蓋范圍和探測距離上比人類感官更具優勢,可以獲取更多類型的有效信息,為決策層提供更有參考價值的數據。部分感知傳感器功能的實現是基于機器學習技術,如攝像頭及激光雷達實現目標識別和船舶行為判斷等功能,感知傳感器的功能實現與人類進行目標識別和行為判斷的過程類似,通過對目標和行為的典型類型進行記錄、聯想和推理,生成目標和行為識別的一定“經驗”,從而達到識別目標和行為的目的。與人類獲取經驗的方式不同,機器學習算法需要通過大量的目標和行為數據對其進行訓練從而產生“經驗”,由于機器學習算法聯想和推理的能力較差。因此除了機器學習算法的性能,用于訓練的數據庫覆蓋范圍成為影響目標和行為識別準確率的主要因素之一。船舶自主化系統的決策層相當于人類的大腦,主要使用模糊推理、神經網絡和貝葉斯網絡等推理算法預測工作場景的態勢,根據“訓練經驗”制定執行策略,決策層的經驗獲取也是依靠機器學習技術來實現,如自主航行系統,需要大量的實際航行場景對其進行訓練,使其在訓練過程中達到類似于人類駕駛船舶的能力,與人類駕駛員類似,訓練場景交通流量、船舶類型、天氣海況等因素的不同會導致“駕駛員”駕駛能力的不同,并且機器“駕駛員”會受限于決策算法性能、處理器速度、感知融合數據等因素的影響。因此需要大量不同類型的訓練場景進行反復訓練,才能在某些情況下實現部分自主化的功能。
綜上所述,機器學習智能化算法是現階段船舶自主化系統實現目標識別、行為判斷和自主決策的核心技術,由于現有算法的推理和預測能力不足,雖然自主化技術在工作場景適用性方面比自動化技術更為廣泛,但是也會遇到類似自動化技術邊界條件有限的技術瓶頸,即訓練庫數據不足,獲得經驗有限。因此在考慮提高機器學習算法性能的同時,應結合現階段算法的實際情況,結合建設成本,集中解決目標、行為、場景訓練庫采集范圍不足以覆蓋所有工況的問題。
近年來,我國智能船舶系統從輔助決策系統向部分自主系統進行過渡,即由自動化向自主化發生質變。隨著處理器技術和相關算法的融合發展,船舶技術自主化的發展成為了現實,部分自主化系統已進入試驗階段,確保船舶自主化技術應用的安全、環保和保障已經成為航運界關注的焦點,國際海事組織在海安會第100次會議上批準了《海上自主水面船舶試驗暫行指南》,在促進船舶自主化技術的發展的同時,防范船舶自主化技術應用帶來的未知風險。在船舶技術從自動化向自主化的發展過程,不僅要思考船舶自主化技術實現的技術路徑,對船舶自主化技術應用進行安全管控也將成為一個重要的研究方向。


